Hidden
Hidden
Hidden
Hidden
Hidden
Hidden
Hidden
Hidden
QUADRATURE SENSOR MEASUREMENT (± ticks) The following instruNet hardware supports measurements from quadrature sensors:
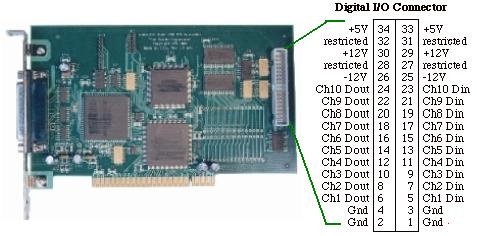
Quadrature Measurement with the iNet-200 PCI Card Overview
Wiring to the i200 Software Setup DasyLab Software Theory of Operation What is a Quadrature Sensor? Quadrature Measurements
|